
Page 158 - indexf
P. 158
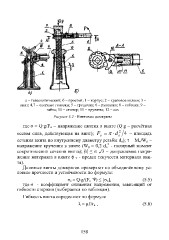
а – телескопический; б – простой; 1 – корпус; 2 – храповое колесо; 3 –
винт; 4,7 – опорные головки; 5 – трещотка; 6 – рукоятка; 8 – собачка; 9 –
гайка; 10 – стопор; 11 – пружина; 12 – ось
Рисунок 5.2 - Винтовые домкраты
где σ = Q·g/Fο – напряжение сжатия в винте (Q·g – расчётная
осевая сила, действующая на винт); Fo =π ⋅ d 2 4 – площадь
o
сечения винта по внутреннему диаметру резьбы dο); τ = Mк/Wp –
напряжение кручения в винте (Wp = 0,2 dο3 - полярный момент
сопротивления сечения винта); σ[ ] ≤ σ т/3 – допускаемое напря-
жение материала в винте σ( т - предел текучести материала вин-
та).
Длинные винты домкратов проверяют по объединённому ус-
ловию прочности и устойчивости по формуле:
σс = Q·g/(Fο ·φ) ≤ [σс], (5.5)
где σ - коэффициент снижения напряжения, зависящий от
гибкости стержня (выбирается по таблицам).
Гибкость винта определяют по формуле
λ = μℓ/ru , (5.6)
158