
Page 361 - indexf
P. 361
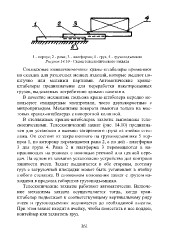
1 - корпус; 2 - рама; 3 - платформа; 4 - груз; 5 - грузоподъемник
Рисунок 14.10 - Схема телескопического захвата
Стеллажные комплектовочные краны-штабелеры применяют
на складах для различных мелких изделий, которые выдают по-
штучно или мелкими партиями. Автоматические краны-
штабелеры предназначены для переработки пакетированных
грузов, выдаваемых потребителю целыми пакетами.
В качестве механизма подъема крана-штабелера нередко ис-
пользуют стандартные электротали, часто двухскоростные с
микроприводом. Механизмы поворота имеются только на мос-
товых кранах-штабелерах с поворотной колонной.
В стеллажных кранах-штабелерах захваты выполнены теле-
скопическими. Телескопический захват (рис. 14.10) предназна-
чен для установки и выемки затаренного груза из ячейки стел-
лажа. Он состоит из закрепленного на грузоподъемнике 5 кор-
пуса 1, по которому перемещается рама 2, а по ней - платформа
3 для груза 4. Рама 2 и платформа 3 перемещаются в на-
правляющих на роликах с помощью реечной или цепной пере-
дач. На одном из захватов установлено устройство для контроля
занятости ячеек. Захват выдвигается в обе стороны, поэтому
груз с загрузочной площадки может быть установлен в ячейку
любого стеллажа. В сложенном положении захват с грузо м на-
ходится в пределах габаритов грузоподъемника.
Телескопические захваты работают автоматически. Включе-
ние механизма захвата осуществляется тогда, когда кран-
штабелер подъезжает к соответствующему вертикальному ряду
ячеек и грузоподъемник поднимается до необходимой высоты.
При этом захват входит в ячейку, чтобы поместить в нее поддон,
контейнер или захватить груз.
361