
Page 374 - indexf
P. 374
раскаленные заготовки при операциях ковки, штамповки или
литья под давлением. При этом нагрев захвата допускается до
температуры не выше 120 °С.
Промышленный робот "Unimate" применяется для выполне-
ния технологических операций в литейном, кузнечно-прессовом,
сварочном, механосборочном, при термической обработке и
других видах производств.
Первые модели промышленного робота "Versatran" были вы-
пущены в 1963 г. фирмой "AMFThermatool" (США).
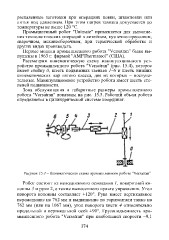
Рассмотрим кинематическую схему манипуляционного уст-
ройства промышленного робота "Versatran" (рис. 15.4), которое
имеет стойку 0, шесть подвижных звеньев 1–6 и шесть низших
кинематических пар пятого класса, две из которых – поступа-
тельные. Манипуляционное устройство робота имеет шесть сте-
пеней подвижности.
Зона обслуживания и габаритные размеры промышленного
робота "Versatran" показаны на рис. 15.5. Рабочий объем робота
определяется в цилиндрической системе координат.
Рисунок 15.4 – Кинематическая схема промышленного робота "Versatran"
Робот состоит из неподвижного основания 1, поворотной ко-
лонны 3 и руки 2, а также вынесенного пульта управления. Угол
поворота колонны составляет ±120°. Рука имеет вертикальное
перемещение на 762 мм и выдвижение по горизонтали также на
762 мм (или на 1067 мм), угол поворота кисти 4 относительно
продольной и вертикальной осей ±90°. Грузоподъемность про-
мышленного робота "Versatran" при наибольшей скорости –9,1
374