
Page 380 - indexf
P. 380
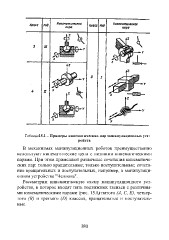
Таблица15.1 – Примеры кинематических пар манипуляционных уст-
ройств
В механизмах манипуляционных роботов преимущественно
используют кинематические цепи с низшими кинематическими
парами. При этом применяют различные сочетания кинематиче-
ских пар: только вращательные; только поступательные; сочета-
ние вращательных и поступательных, например, в манипуляци-
онном устройстве "Челнока".
Рассмотрим кинематическую схему манипуляционного уст-
ройства, в которое входят пять подвижных звеньев с различны-
ми кинематическими парами (pис. 15.8): пятого (А, С, Е), четвер-
того (В) и третьего (D) классов, вращательные и поступатель-
ные.
380