
Page 381 - indexf
P. 381
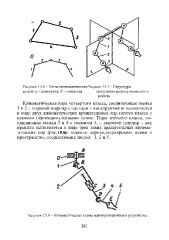
Рисунок 15.6 – Типы кинематическихРисунок 15.7 - Структура
цепей: в – замкнутая; б – открытая механизма манипуляционного
робота
Кинематическая пара четвертого класса, соединяющая звенья
1 и 2 – шаровой шарнир с пальцем – конструктивно выполняется
в виде двух кинематических вращательных пар пятого класса с
взаимно перпендикулярными осями. Пара третьего класса, со-
единяющая звенья 3 и 4 с захватом 5, – шаровой шарнир – как
правило выполняется в виде трех таких вращательных кинема-
тических пар (рис.15.9)с взаимно перпендикулярными осями в
пространстве, соединяющих звенья 1, 2 и 3.
Рисунок 15.8 – Кинематическая схема манипуляционного устройства
381