
Page 417 - indexf
P. 417
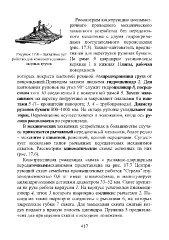
Рассмотрим конструкцию несиммет-
ричного приводного механического
захватного устройства без передаточ-
ного механизма с двумя гидроприво-
дами поступательного перемещения
(рис. 17.5). Захват-кантователь предна-
Рисунок 17.4 – Захватное уст- значен для перегрузки рулонов бумаги.
ройство для комплекта длинно- На раме 9 шарнирно установлены
мерных грузов верхняя 1 и нижняя 11лапы, рабочая
поверхность
которых покрыта листовой резиной дляпредохранения груза от
повреждений.Приводом захвата является гидроцилиндр 2. Для
кантования рулонов на угол 90° служит гидроцилиндр 8, посред-
ством тяги 10 соединенный с поворотной рамой 9. Захват наве-
шивают на каретку погрузчика и закрепляют планками 6и вин-
тами 5 (7– кронштейн поворота; 3, 4 – трубопроводы). Диаметр
рулонов бумаги 800–1000 мм. На складе рулоны укладывают на
торец. Перемещение осуществляется в положении, когда ось ру-
лона расположена по горизонтали.
В механических захватных устройствах в большинстве случа-
ев применяется рычажный передаточный механизм, более редко
– механизм с канатной, ременной, цепной передачами. Сущест-
вует несколько типов рычажных передаточных механизмов
схватов. Рассмотрим кинематические схемы основных из них
(рис. 17.6).
Конструктивная реализация схвата с рычажно-шарнирным
передаточныммеханизмом представлена на рис. 17.7 Центри-
рующий схват семейства промышленных роботов "Стрела" гру-
зоподъемностью 0,6 кг имеет пневмопривод и манипулирует
цилиндрическими деталями диаметром 33–52 мм. Схват крепит-
ся на руке робота корпусом 1. На корпусе установлен пневмоци-
линдр 4, шток 3 которого шарнирно соединенс рычагами 2. По-
следние также шарнирно соединены с рычагами 6, на которых
закреплены губки 7 схвата. Для замыкания схвата сжатый воз-
дух подают в правую полость цилиндра. Пружина 5 предназна-
чена для приведения схвата в исходное положение.
417