
Page 421 - indexf
P. 421
стичной присоски в осевом направлении под действием, напри-
мер, силы тяжести самого захвата, опущенного на рабочую по-
верхность объекта. Для освобождения захвата от груза приме-
няют управляемые клапаны.
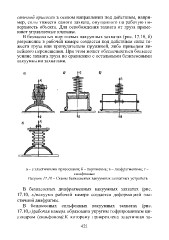
В безнасосных поршневых вакуумных захватах (рис. 17.10, б)
разрежение в рабочей камере создается под действием силы тя-
жести груза или принудительно пружиной, либо приводом ли-
нейного перемещения. При этом может обеспечиваться большее
усилие захвата груза по сравнению с остальными безнасосными
вакуумными захватами.
а – с эластичными присосками; б – поршневые; в – диафрагменные; г –
сильфонные
Рисунок 17.10 – Схемы безнасосных вакуумных захватных устройств
В безнасосных диафрагменных вакуумных захватах (рис.
17.10, в)вакуумв рабочей камере создается деформацией эла-
стичной диафрагмы.
В безнасосных сильфонных вакуумных захватах (рис.
17.10,г)рабочая камера образована упругим гофрированным ци-
линдром (сильфоном).К которому прикреплена эластичная за-
421