
Page 344 - indexf
P. 344
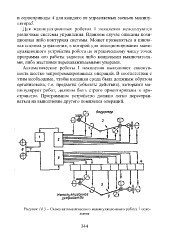
и сервоприводы 4 для каждого из управляемых звеньев манипу-
лятора5.
Для манипуляционных роботов I поколения используются
различные системы управления. Вданном случае описаны пози-
ционная либо контурная системы. Может применяться и цикло-
вая система управления, в которой для позиционирования мани-
пуляционного устройства робота по ограниченному числу точек
программа его работы задается либо концевыми выключателя-
ми, либо жесткими переналаживаемыми упорами.
Автоматические роботы I поколения выполняют совокуп-
ность жестко запрограммированных операций. В соответствии с
этим необходимо, чтобы внешняя среда была должным образом
организована, т.е. предметы (объекты действия), которыми ма-
нипулирует робот, должны быть строго ориентированы в про-
странстве. Программное устройство должно легко перестраи-
ваться на выполнение другого комплекса операций.
Рисунок 14.3 – Схема автоматического манипуляционного робота 1 поко-
ления
344