
Page 390 - indexf
P. 390
относительные перемещения звеньев и размерами шарниров ко-
торого можно пренебречь.
Для определения коэффициента сервиса необходимо знать
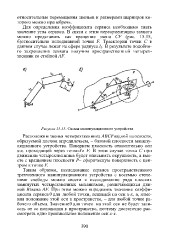
значение угла сервиса. В связи с этим переориентацию захвата
можно представить как вращение звена СF (рис. 15.15,
б)относительно неподвижной точки F. Траектории точки С в
данном случае лежат на сфере радиуса l3. В результате подобно-
го закрепления захвата получим пространственный четырех-
звенник со стойкой AF.
Рисунок 15.15- Схемы манипуляционного устройства
Расположим звенья четырехзвенника ABCFводной плоскости,
образуемой плечом ипредплечьем, – базовой плоскости манипу-
ляционного устройства. Повернем плоскость относительно оси
х-х. проходящей через точкиАи F. В этом случае точка С при
движении четырехзвенника будет описывать окружность, а вме-
сте с вращением плоскости Р– сферическую поверхность с цен-
тром в точке F.
Таким образом, исследование сервиса пространственного
трехчленного манипуляционного устройства с восемью степе-
нями свободы можно свести к исследованию ряда плоских
замкнутых четырехзвенных механизмов, различающихся дли-
ной Rзвена AF. При этом можно определить значение коэффи-
циента сервиса θ для любой точки, лежащей на оси х-х, а, изме-
няя положение этой оси в пространстве, – для любой точки ра-
бочего объема. Значениеθ для точек на этой оси не будет зави-
сеть от ее положения в пространстве, поэтому достаточно рас-
смотреть одно произвольное положение оси х-х.
390